Kontrol penerbangan telemetri untuk komputer mikro 5V
Penerima RC 8ch (kompatibel dengan S.BUS, penerima Futaba kompatibel)
Pemancar RC yang kompatibel dengan OpenTX
Penyimpanan untuk menyimpan file konfigurasi OpenTX
Baterai untuk sistem kontrol proporsional 2600mAh
Baterai LiPo untuk drone 3000mAh 11.1V
LiPo Battery Charger for Drones
instruksi
Gambaran umum fungsiona
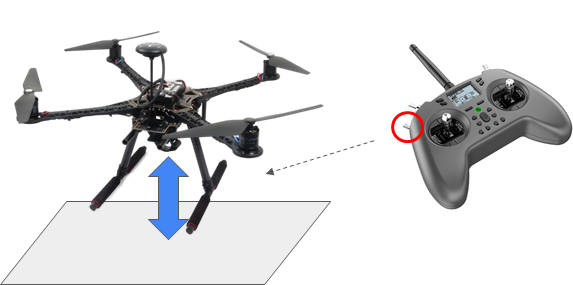
1. Operasi manual
Dapat dioperasikan dengan sistem kendali proporsional seperti drone komersial lainnya. Karena operasi interupsi selama penerbangan otonom juga dimungkinkan, keamanan dapat dipastikan. Hanya dengan menyalakan / mematikan sakelar pendaratan radio, Anda dapat dengan aman dan otomatis berangkat dan mendarat dengan pengontrol penerbangan.
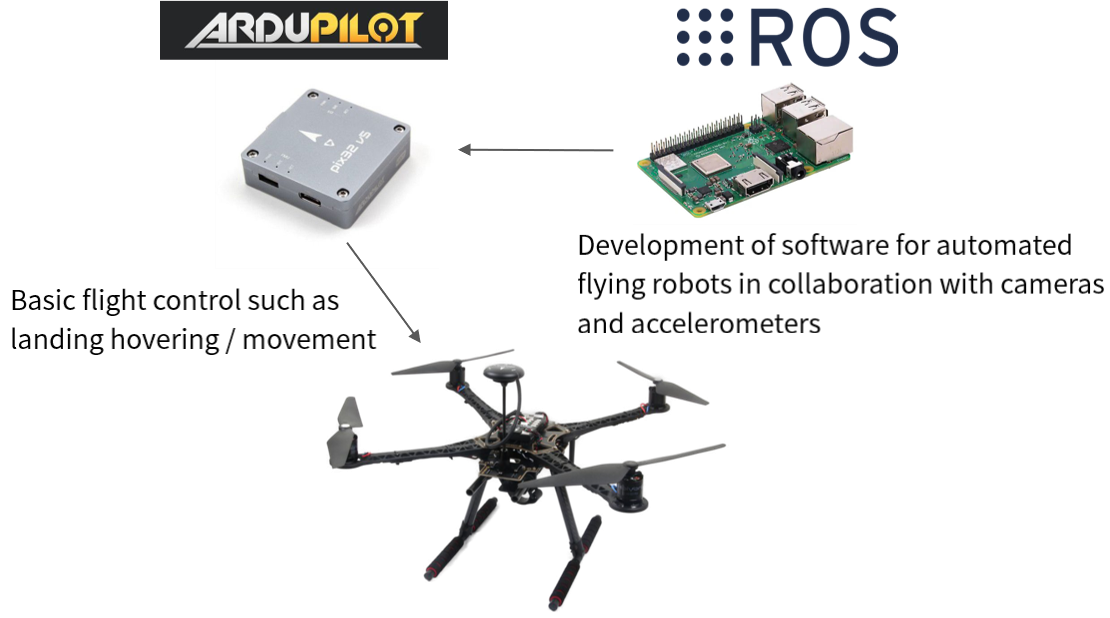
2. Manfaatkan proyek open source (Raspberry Pi, ROS, Pixhawk, Ardupilot)
Gunakan Raspberry Pi dan ROS untuk kontrol penerbangan otomatis, dan Pixhawk dan Ardu Pilot untuk kontrol penerbangan drone dasar. Ini banyak digunakan di seluruh dunia dalam bidang pengembangan drone, jadi jika Anda menguasainya, Anda dapat berperan aktif sebagai insinyur drone di mana pun anda berada.
3. Mendukung QGroundControl
QGroundControl, sebuah aplikasi operasi drone open-source yang dikelola oleh Linux Foundation, memungkinkan Anda untuk mengatur parameter penerbangan otonom, monitor selama penerbangan, dan secara otomatis terbang ke lokasi yang terdaftar. QGroundControl adalah program open source yang banyak digunakan di situs pengembangan drone di seluruh dunia.
4. Mendukung MAVLink
MAVLink adalah protokol komunikasi standar de facto yang banyak digunakan dalam kontrol drone. Paket ROS resmi juga tersedia, yang mendukung penerimaan data sensor seperti akselerasi / gyro / GPS dan transmisi perintah rute pergerakan untuk penerbangan otonom. Oleh karena itu, bahkan pemula yang mencoba program penerbangan otonom untuk pertama kalinya dapat belajar secara efektif.
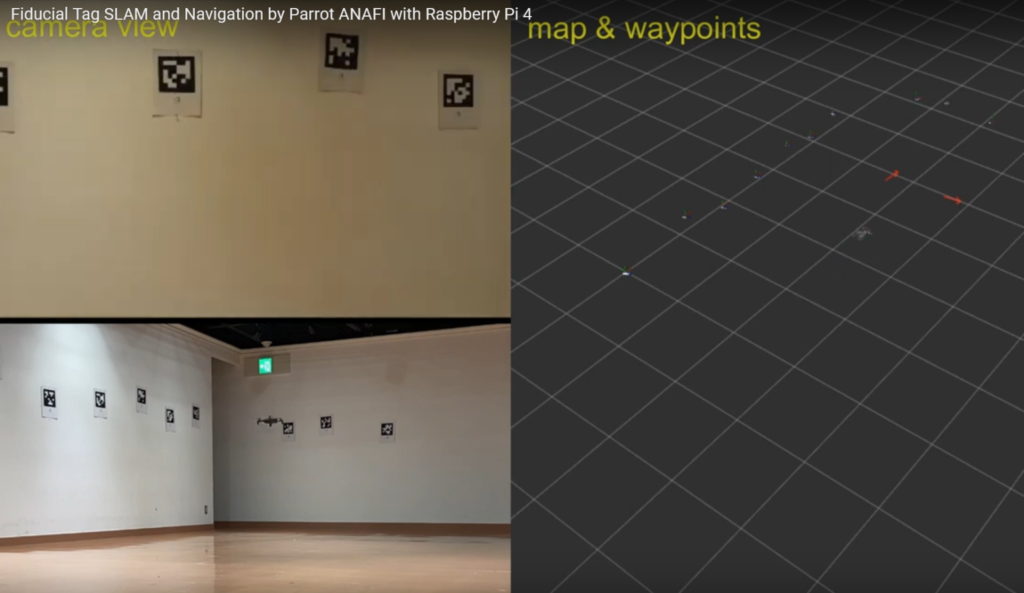
5. Penerbangan otonom dalam ruangan dengan kamera (opsional)
Dengan menambahkan bagian opsional, penerbangan otonom di dalam ruangan hanya dapat direalisasikan dengan pemrosesan gambar kamera. Ini dapat digunakan untuk penelitian penerbangan otonom untuk fasilitas yang berada di luar jangkauan GPS.
Spesifikasi
Table Style
Ukuran
Panjang 383 mm, lebar 385 mm, tinggi 240 mm
Jarak sumbu roda diagonal
480mm
Berat
782g (tidak termasuk baterai)
Waktu penerbangan maksimum
Sekitar 20 menit
Batas operasional
Menguji hingga 150m jangkauan regulasi penerbangan