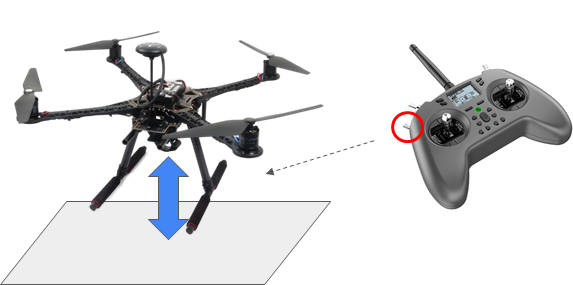
Se puede operar con sistema de control proporcional como los otros drones comerciales. Dado que también es posible interrumpir la operación durante el vuelo autónomo, se puede garantizar la seguridad. Con solo encender/apagar el interruptor de aterrizaje de la radio, puede partir y aterrizar de forma segura y automática con el controlador de vuelo.
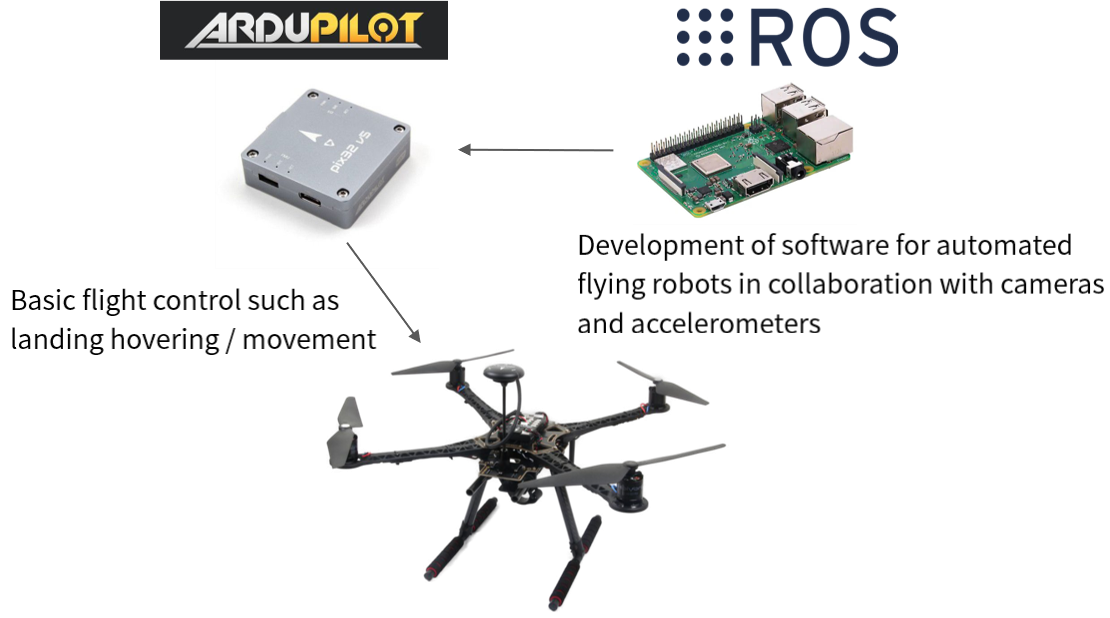
Usar Raspberry Pi y ROS para el control de vuelo automático, y Pixhawk y Ardu Pilot para el control de vuelo básico de drones. Estos se utilizan en todo el mundo en el campo del desarrollo de drones, por lo que si los domina, puede desempeñar un papel activo como ingeniero de drones en cualquier parte del mundo.
3. Admite QGroundControl
Usando la aplicación de operación de drones de código abierto QGroundControl administrada por la Fundación Linux, puede establecer parámetros de vuelo autónomos, monitorear durante el vuelo y volar automáticamente a puntos registrados. QGroundControl es un software de código abierto que se usa ampliamente en sitios de desarrollo de drones en todo el mundo.
4. Admite MAVLink
MAVLink es el protocolo de comunicación estándar de facto ampliamente utilizado en el control de drones. También está disponible el paquete oficial ROS, que admite la recepción de datos de sensores como aceleración/girocompás/GPS y transmisión de comandos de ruta de movimiento para vuelo autónomo. Por lo tanto, incluso los principiantes que prueban programas de vuelo autónomos por primera vez pueden aprender de manera efectiva.
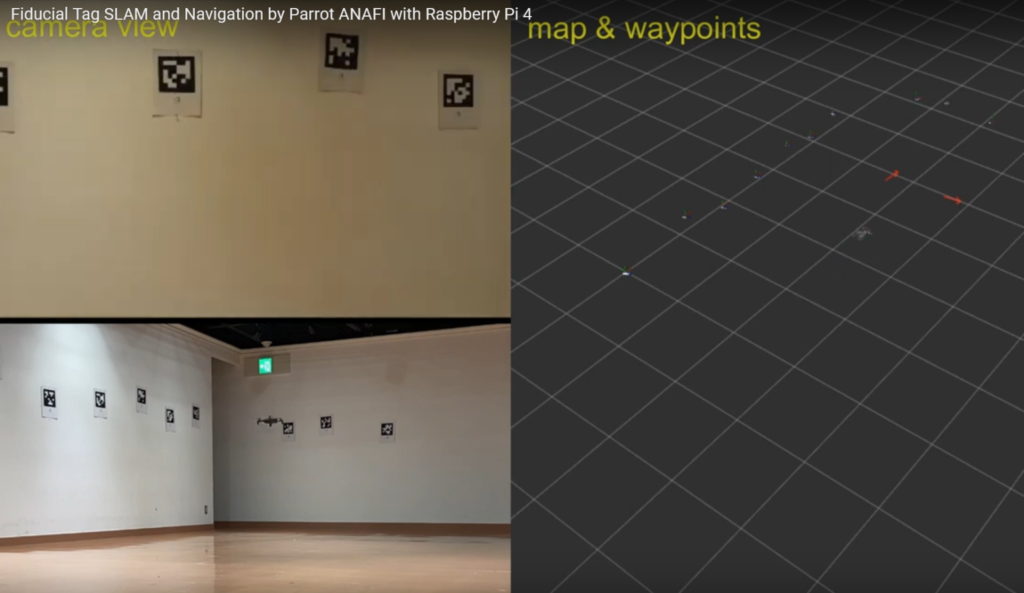
5. Vuelo autónomo interior con cámara (opcional)
Si agrega piezas opcionales, puede volar en interiores de forma autónoma con solo procesar la imagen de la cámara. Se puede utilizar para la investigación de vuelos autónomos para instalaciones que están fuera del alcance del GPS.
Especificación
Table Style
Talla
Largo 383 mm, ancho 385 mm, alto 240 mm
Distancia entre ejes diagonal
480mm
Peso
782 g (sin batería)
Tiempo máximo de vuelo
Alrededor de 20 minutos
La altura limite del uso
Probado hasta 150 m de rango de regulación de aviación